Article Text

Statistics from Altmetric.com
- methodology: haddon matrix
- mechanism: motor vehicle - occupant
- interventions: engineering
- interventions: equipment
Introduction
Self-driving or highly automated vehicle (HAV) technologies, now undergoing public trials in major cities,1 are positioned to bring about transformative change to the entire transportation system. Far from being a distant innovation, retail autonomous vehicles have already been announced by various manufacturers for release as early as 2018, complementing estimates that on-road HAVs will reach market ubiquity as part of a US$7 trillion passenger economy by 2055.2 Transportation planners and policymakers are welcoming HAVs for their potential to positively impact traffic safety by fundamentally changing the interaction and relationship between drivers and vehicles, and how drivers and vehicles collect and process information from their environment. HAVs will not, however, offer safety in every possible condition. As HAV technology will have limits, manufacturers and lawmakers suggest vehicles have an operational design domain (ODD) which specifies under which conditions an autonomous driving mode can perform safely.3 ODDs may require HAVs to avoid mixed vehicle routes, inclement weather conditions or unmarked roads; in general, ODDs reflect the limits of HAV technologies. In engineering terms, these are known as ‘edge conditions’: situations that go beyond the reliable and accurate capability and limits of HAV technology. The injury prevention community must understand how these edge conditions could lead to crashes in order to formulate crash countermeasures which ultimately inform vehicle development standards and training.
The Haddon Matrix, the long-established safety paradigm for injury prevention, has a rich history of helping those focused on transportation safety explicitly separate roles and responsibilities of all drivers, technologies and environmental factors involved in a crash event.4 A new framework and modification of the Haddon Matrix is needed as man–machine–environment interactions will be facilitated by technology and roles in preventing a crash event will be much more shared. While one could argue that the Haddon Matrix was not intended to address technology in which the driver has little or no control over the vehicle, the Haddon Matrix is still critically important for conceptualising injury prevention when the human is in the loop. Others have conceptualised alternatives to the Haddon Matrix and the future of the Haddon Matrix as a continuum across roles and responsibilities.5 6 The goal of this editorial is to build on the literature that is reconceptualising long-held transportation safety paradigms and serves as a call to action to continue reimagining and reformulating the Haddon Matrix due to the emergence of HAVs and the human–machine interface.
We begin with a reminder of the Haddon Matrix for conventional vehicles (ie, those that do not have autonomous driving capabilities). We then present classifications of vehicular autonomy and their associated capabilities and discuss how these vehicles might blur the lines between the actors articulated in the Haddon Matrix. We then provide a notional Haddon Matrix considering the impact of automation on each domain and question these developments from an injury prevention lens, thus providing the foundation on which the injury prevention community can approach modifying the Haddon Matrix before HAV technology becomes widely available.
A look at the Haddon Matrix for conventional vehicles
In a Haddon Matrix representation of a typical automobile crash, various actors involved in vehicle safety (encompassing the driver, the vehicle and the social/physical environments) inhabit specific and well-define roles scaled along the discrete phases of the collision timeline.7 Consider figure 1, which presents an example of the Haddon Matrix for conventional vehicles. For each phase of a crash—pre-event, during event, and post-event—the roles and responsibilities of the driver, the vehicle and the physical and social environments in causing or preventing a crash are articulated. In this editorial, to focus our conceptualisation of the historical Haddon Matrix and how it will shift with the introduction of HAVs, we present only the pre-event and during event phases. The pre-event phase incorporates countermeasures that could have avoided a crash or reduced the severity of a crash before the crash. During the event, countermeasures are captured that are specific to the instant of crash. While we do not illustrate all the temporal aspects of the Haddon Matrix in figure 1, a post-event role of the driver of a conventional vehicle would be communication with medical professionals.

Example of pre-event and during event Haddon Matrix countermeasures for conventional automobile crash scenarios.
A brief background on HAV technology
The Society of Automotive Engineers (SAE) International describes automation standards based on vehicle functionality. Per this system, most conventional, manned vehicles on the road can be labelled as either SAE Level 1 or 2, which means that many or all features are handled by a human driver who continually monitors the safety environment.8 Vehicles in the SAE Level 2 category provide warnings to drivers, such as if a driver is following a vehicle too closely. Recent HAV designs, however, fall within SAE Level 3, where autonomous driving modes scan the environment for threats with the expectation that a human driver can intervene. More advanced warning systems for the driver and eventually as limits on HAV operation (which would be SAE Level three and beyond), may alert a driver/prevent a vehicle from speeding, require seatbelt use for vehicle operation and disallow vehicle operation if the human is fatigued or under the influence of drugs/alcohol. Additional levels (SAE 4 and 5), though not available on the market today, will no longer require human intervention, with the vehicle being able to operate under all conditions suitable for normal human driving. Vehicles classified as SAE Level 3 and beyond use systems such as light detection and ranging (LIDAR), front and rear-facing cameras and road-monitoring algorithms to evaluate the road conditions and provide appropriate alerts and performance.9
The Haddon Matrix with Level 3 HAV technology
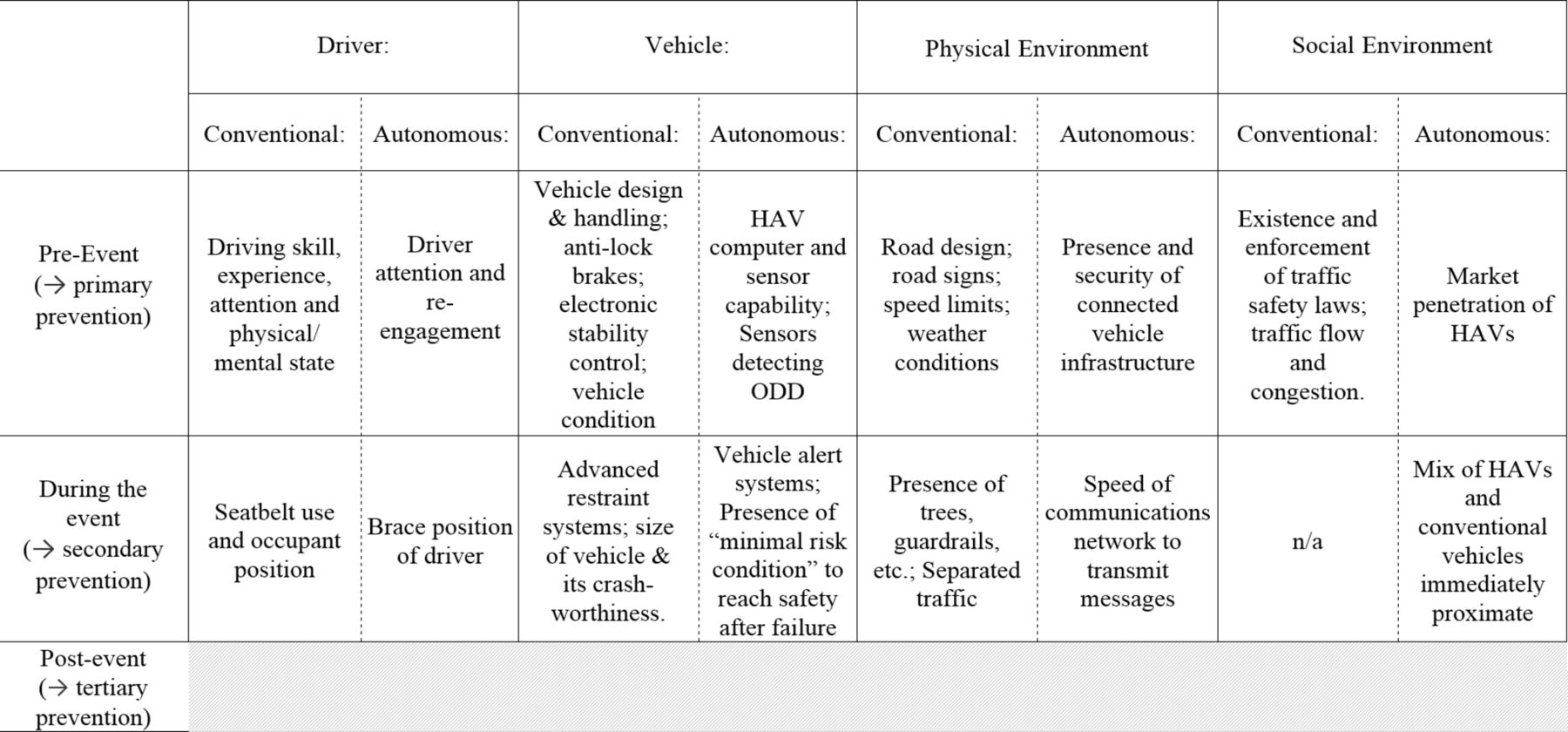
With the introduction of Level 3 autonomous vehicles into the transportation fleet, the Haddon Matrix portrayal of automotive collisions for conventional automobiles needs to be modified. Roles which were considered separate in the Haddon Matrix for conventional vehicles will now be shared between man–machine–environment. In this way, the Haddon Matrix for HAVs in SAE Level 3 is moving towards a continuum instead of a matrix with clearly defined roles and responsibilities for the actors and environments. In addition to a continuum across roles, the Haddon Matrix must now cover situations that go beyond the reliable and accurate capability of the HAV technology or the edge conditions (see figure 2).
{kind=link}
{kind=link}
Example of pre-event and during event revised Haddon Matrix countermeasures for Level 3 HAV crash scenarios.
The combination of duties will increase for the driver as the option to enter autonomous mode instead of actively needing to control the vehicle will require drivers to face multiple types of demands (eg, overseeing vehicle functioning should the system signal an autonomous failure). Level 3 HAVs will operate autonomously in certain conditions, and traditional driver considerations will remain relevant all of the time during manual mode and for emergency takeover during edge conditions while in autonomous mode. Therefore, the human driver will need to be aware within what ODD limits their autonomous vehicle functions (ie, a new edge condition) while also being aware of their driving skill and other traditional factors for crash avoidance should the autonomous mode fail or the driver choose to return to manual control (ie, a merging of vehicle and driver countermeasures).
The role of the vehicle will also incorporate both conventional and autonomous injury prevention responsibilities. In autonomous drive, the vehicle will need to pilot the vehicle and scan for danger on top of its regular occupant protection roles (see figure 2). For the new Haddon Matrix paradigm, experts should consider many more factors about the vehicle, including whether its technology is sophisticated enough to mitigate mistakes by human drivers or whether that technology functions correctly to save the occupant when presented with a hazard in multiple manned and unmanned scenarios. The Haddon Matrix will need to reflect a full description of its own ODD (such as computer system functionality during day or night, information on what type of roadway is required, ideal weather conditions, etc), whether the vehicle possesses robust cybersecurity protections and whether developers have created a ‘minimal risk condition’ that triggers a safe standstill should failure occur.3 Traditional safety feature concerns like airbags, seatbelts and their proper upkeep will still be elements ensuring occupant safety, and thus must be kept in a new Haddon Matrix paradigm in addition to the vehicle’s growing HAV capabilities. While we do not illustrate all the temporal aspects of the Haddon Matrix in figure 2, a post-event role of the HAV would be notification, telemedicine communications, response and prehospital care.
The role of the physical environment will have its own new concerns with the spread of Level 3 vehicles, as traditional crash considerations from infrastructure design will likely be challenged by HAV and connected technology communication needs. With HAVs, a HAV can be taken out of its ODD either inadvertently or purposefully and thus enter a physical environment where it is unable to safely maintain self-driving functionality irrespective of the infrastructure’s quality. Furthermore, the presence of connected vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communication will increasingly factor into the crash environment for HAVs in autonomous mode because their presence could one day determine if a HAV computer needs to account for unpredictable human error or can safely work with information from computerised sources. This connected environment will also present yet-unsolved vulnerabilities from cyber threats, which have already successfully hijacked vehicles mid-travel and could threaten the safety of the occupant while the vehicle handles driving responsibilities.10
In the social environment, shifting roles will centre around the merger between conventional law and HAV-specific concerns about the compatibility of the legacy fleet with autonomous vehicles. While under normal circumstances all road-bound vehicles must comply with a country-specific Motor Vehicle Safety Standards to ensure expected performance,11 both the 2016 US National Highway Traffic Safety Administration guidelines and the US House Legislation approved mass exemptions for autonomous vehicles to be tested on roadways without certification of safety. In addition, HAV technology is less predictable on mixed vehicle roadways,9 and this scenario is likely to remain the status quo for some time given the average vehicle is aged 11.6 years as of 2016.12 Lastly, ‘fault’ in the event of a crash—driver or technology—has not been defined clearly. Therefore, because laws allow for multiple types of vehicles and a mixture of conventional vehicles and untested HAVs, analysis will need to consider both how humans and machines might impact autonomous functioning and present edge conditions in a mixed environment while also being mindful of how laws traditionally impact behaviour on the road.
The nature of shifting responsibilities for all domains in the Level 3 HAV crash scenario are represented in figure 2 in a possible reconfiguration of the Haddon Matrix, with dotted lines signalling the dual concerns each domain must addressed based on either autonomous or standard features.
The Haddon Matrix for HAVs in SAE Level 3 is moving towards a continuum instead of a matrix with clearly defined roles and responsibilities for the actors and environments. The Haddon Matrix must now cover situations that go beyond the reliable and accurate capability of the HAV technology, or the edge conditions (see figure 2). HAVs may communicate through widespread V2V or V2I technologies and can ‘platoon’ with a greatly reduced risk of crashing. Such a configuration might require the addition of new actors such as the ‘intelligent transportation system’ directing traffic flow for human use.13 As the intelligent transportation system may be vulnerable to malicious cyber threats, it may be necessary for future Haddon Matrix designs to recognise additional actors involved in the crash event.
The Haddon Matrix with Levels 4 and 5 HAV technology
The future development of SAE Levels 4 and 5 vehicles that will perform ‘all aspects of the dynamic driving task’ could require the ‘human driver’ actor in the Haddon Matrix to be altered or removed.8 Per SAE International, future vehicles bearing Level 4 or 5 distinction will not need active driver reintervention and should be advanced enough to accomplish the task of an ordinary human driver themselves. This leaves an uncertain role for the human.
First, inside the vehicle, human control and error can in part be eliminated from the equation; yet, their behaviour as a passenger (such as the wearing of seatbelts) remains relevant. Consider that a vehicle designed for full autonomy (eg, without a steering wheel or breaks) might prevent drivers from ensuring their own safety should the technology malfunction14 and/or make decisions regarding safety that are not consistent with the values of the driver.
Second, it is possible that humans will continue to pilot vehicles remotely, off-site, much like air traffic controllers. If this is the case, safety will depend on the skill and focus of remote pilots, as well as the connections between the remote pilot and the vehicle.
With the driver not responsible for safety but instead reimagined as another passenger, the injury prevention community will need to focus even more exclusively on the vehicle role and the evaluation of the algorithms/technology, as it will be responsible both for driving normally, operating off sensory input in emergencies and ensuring occupant protection all at the same time (eg, vehicles will need to be a Moral Machine15). How planners will prepare for machine-based behaviour without the help of a human overseer—or the help of a remote pilot as an overseer—in these conditions remains unclear. Further, it is not clear how accepting drivers will be of this new technology and will likely depend on how removed the human is from any vehicle functioning.
Given the limited in-vehicle role of the human in HAVs Levels 4 and 5 and the possibility of a physically dispersed role of the human with HAVs Levels 4 and 5, one could argue that for the Haddon Matrix to remain relevant it would have to change dramatically.
HAVs and the injury prevention community
The injury prevention community must play a role in shaping HAV design to forward positive public health outcomes. While much remains uncertain about the outcome of future HAV development, it is already clear that the injury prevention community, with their insight into transportation safety, must be engaged in the development and evaluation of HAVs. The injury prevention community must work with (1) the automotive engineering community to help design HAVs as they continue to develop and evaluate from Level 3 onward and (2) the infrastructure design community to help them design infrastructure that promotes multimodal transportation safety with HAVs. This involves developing new frameworks for roles and responsibilities in a crash and utilising these frameworks to guide HAV technology and the remote piloting: in short, incorporating edge conditions into mainstream public health discussions and practices. Given the growing prevalence of HAV technology and injury, the prevention field’s continued imperative to keep the transportation system as safe as possible for all.
Acknowledgments
The authors would like to acknowledge the Center for Injury Research and Prevention for their support. The findings and conclusions are those of the author(s) and do not necessarily represent the views of the Children’s Hospital of Philadelphia.
Footnotes
Contributors MSR shaped the argument and analysis, drafted the article and made continual revisions and approved the final version of the manuscript. JEM drafted the article and made continual revisions. FKW shaped the argument and the analysis and performed a critical revision of the article and final approval of the article.
Funding This work was funded, in part, by Dr. Winston’s Distinguished Chair in the Department of Pediatrics at The Children’s Hospital of Philadelphia.
Competing interests None declared.
Provenance and peer review Not commissioned; externally peer reviewed.