Article Text

Abstract
Sixteen year old drivers are involved in 10.3 fatal crashes per 100 million vehicle miles, a rate almost double that of 18 year olds and almost eight times that of 45–64 year olds, who are the safest group of drivers. Crash rates are particularly higher during the first month of licensure and decline rapidly for about six months and 1000 miles and then much more slowly for at least two years, consistent with a typical learning curve. Research indicates that drivers who have their learner’s permit or are just newly licensed have particular difficulties identifying areas of a scenario from which hidden risks could emerge. Standard driver education programs do not appear to address these difficulties adequately. This suggests that some alternative form of driver training could reduce the crashes, either in the classroom or on the road. A PC based program designed to teach drivers to recognize risks early on is shown to improve their awareness of hazards, both on an advanced driving simulator and on the road.
- GDL, graduated driver licensing
- RAPT, risk awareness and perception training
- novice drivers
- risk recognition
- driver training
- eye movements
- driving simulators
Statistics from Altmetric.com
Sixteen year old drivers are involved in 10.3 fatal crashes per 100 million vehicle miles, a rate almost double that of 18 year olds and almost eight times that of 45–64 year olds, who are the safest group of drivers.1 Crash rates are particularly higher during the first month of licensure. They decline rapidly for about six months and 1000 miles and then much more slowly for at least two years (consistent with a typical learning curve). This raises the question of whether some form of driver education—either in the classroom or on the road—could reduce the crashes among newly licensed drivers (drivers who have had a restricted or junior operator’s license six months or less).
Unfortunately, standard driver education programs in the United States (30 classroom hours, six hours behind the wheel, and six as observer) and more advanced training courses for novice drivers have failed to decrease newly licensed driver’s fatalities demonstrably. (The label “novice drivers” will be used to refer to the subset of drivers who are learning to drive, but do not have a restricted license. For example, these may be students in a driver education class. They may or may not have their learner’s permit.) This is as true today2 as it was almost 30 years ago when the landmark DeKalb County study was undertaken in Georgia.3 More recent studies have shown that there is actually a slightly greater crash risk for graduates of standard training programs,4–6 perhaps because driver education graduates are licensed earlier than their counterparts.3,7,8
The situation is changing somewhat with the widespread introduction of graduated driver licensing (GDL) programs, in which there are at least three stages in the licensing process (learner’s permit, restricted licensure and full licensure). Graduated licensing programs typically require that novice drivers spend upwards of 30 hours driving with an adult in a car during the learner’s permit phase, thus increasing the novice driver’s supervised experience on the road. However, it is disturbing that there is no relation between the number of hours that a novice driver spends in supervised driving with his or her parents and the crash rate of the newly licensed driver once he or she is out on the road unsupervised.9 Thus, the value of training is again brought into question, this time training behind the wheel with the parent as supervisor.
It has been demonstrated that a major cause of newly licensed driver crashes is the failure to scan effectively for potential risks.10–14 Recently, PC based training programs have been devised that target this problem. However, only a handful of these programs has actually been evaluated, including the programs developed by the AAA Foundation for Traffic Safety,15,16 the Monash University Accident Research Centre,17 and Systems Technology, Inc.18 The evaluations have shown that PC based training helps novice drivers perform better on a driving simulator.
There is still much to be done, however. First, all the above evaluations were completed using vehicle behaviors as the dependent variables, but as noted above, a major difficulty the newly licensed driver has is scanning the roadway,10 and this is not easily measured with vehicle behaviors. Second, in the above studies, the effects of training in a simulated driving environment were evaluated immediately after the PC based training and not at some longer lag which might be more representative of the time between PC based training and actual driving. Third, there were no attempts to determine whether the effects of PC based training transfer not only to a driving simulator, but also to the open road.
Three studies are described below which address these related issues. These studies are an evaluation of a PC based risk awareness and perception training program (RAPT). Two of the studies assessed the training of risk awareness on a driving simulator (RAPT-1 and RAPT-2), and one assessed it in the field (RAPT-3). In some of the training scenarios that we developed for RAPT, the places at which the driver must look contain actual risks (for example, cars in an adjacent lane that may pull out suddenly) or signal risks (for example, a stop sign). However, in the majority of the scenarios, the places at which the drivers needed to look in order to reduce their risks were ones in which a threat could potentially materialize that was hidden from drivers as they approached the potential risk (for example, a pedestrian that may be obscured from drivers as they approach the crosswalk (see fig 1)).

Plan view: truck crosswalk scenario.
NOVICE DRIVER RISK AWARENESS TRAINING PROGRAMS
Regardless of the type of the scenario, the RAPT program has been designed with three general principles in mind. First, we want the novice drivers to have the information learned on the PC available at the time they need to retrieve it on the open road. Towards this end, RAPT is consistent with the theoretical research which indicates that the deeper the level of processing of an event, the more likely the event is to be stored in long term memory.19,20 For example, RAPT encourages deep processing in scenarios where risks are hidden by asking the novice drivers to visualize for themselves where those risks are located rather than simply presenting those risks. Second, we want novice drivers to recognize risky scenarios on the road that resemble, but can never be identical to, the ones they saw in training. In this respect, RAPT is consistent with the literature which indicates that near transfer is maximized when the cues needed to retrieve the knowledge in the situation to which transfer is needed are directly present in the training situation.21–23 RAPT uses a technique referred to as hugging,23 or targeted training, to maximize this type of learning, giving students explicit but schematic plan views (top down) (see fig 1) of the scenarios that are risky. It trains them to identify regions where information is contained that should be sampled because it can reduce their likelihood of a crash. Finally, we want the novice drivers not only to recognize risks in scenarios that are similar to the ones that they encounter in RAPT, but also to recognize risks in the broad range of scenarios which they might encounter on the open road. RAPT is consistent with the research which indicates that learning transfers best when the principles needed to generalize what one has learned are explicitly abstracted for the learner.24,25 Towards this end, RAPT not only presents a scenario which is risky, but also explains to the novice driver why it is risky and actually displays to the driver when a risk is a hidden one what areas of the visual field are obstructed in a particular scenario. In our assessment of RAPT, we test for the effects of training both in situations that resemble the scenarios in training (near transfer) and those that only embody certain general principles (far transfer).
Simulator tests: RAPT-1
In the first reported study of RAPT, 48 novice drivers were put in a simulated driving environment to evaluate whether hazard detection training on a PC could be effective.26–28 All were high school students who had had their learner’s permit for one to five months. Twenty four were randomly assigned to the trained group (RAPT) and the other 24 to the untrained group. Each PC training session consisted of three sections—a pre-test, training, and post-test section. Here we describe just the pre-test and post-test sections (which were identical). The details of training are described fully in other publications, but basically they involved instruction using the same plan views as the pre- and post-test.26–28
In the RAPT-1 pretest, each participant saw a plan view of a scene with vehicles and pedestrians (in some cases), along with three red circles and three yellow ovals on the side. The participants were told to imagine that they were driving the two-toned car in the plan view (color was used in the actual training scenarios; the figures are in grayscale) and that they had two tasks. The first was to drag a red circle to any area of the scene which they should monitor more or less continuously. For example, in the truck crosswalk scenario (fig 1), a truck is stopped on the side of the road in front of a marked midblock crosswalk in a suburban development. The participant driver is in the two-toned car in the right lane in the figure and so cannot see potential pedestrians crossing in front of the truck and therefore should look to the right for a pedestrian and also steer further to the left as he or she passes in front of the truck. In this case, the participants should have dragged a red circle to an area ahead of them beside the front left edge of the truck. The second task was to drag a yellow oval to any area of the scene which could potentially contain a vehicle, pedestrian, or sign that they could not see from their current position but which could give them information which would reduce their likelihood of a crash. In this case, the participant should have dragged a yellow oval to an area in front of the truck which obscured a potential pedestrian. The positions of the ovals and circles were scored in the pre-test and posttest as correct or incorrect.
The pre-test data indicated that the untrained participants were not good at either the yellow oval or red circle tasks. Additionally, and importantly, the post-test data indicated that the training was successful in getting the participants to perform the two required tasks well. Participants were almost twice as good at placing the red circles correctly after training, scoring 50% on average in the pretest and 91% on the post-test, a difference which was significant.28 They were about three times as good at placing the yellow ovals after training, scoring 32% on the pre-test and 90% on the post-test, again a significant difference.
Immediately after being trained on the PC, the 24 novice drivers were asked to negotiate a drive containing 16 different scenarios on the University of Massachusetts driving simulator (fig 2). Ten of the scenarios were similar to scenarios that the novice drivers had seen in the PC based training (the near transfer scenarios); six were quite different (the far transfer scenarios). The novice drivers operated the controls of the vehicle in which they sat just as they would the controls of any normal vehicle, moving through the virtual world accordingly. A head-mounted eye tracker was used to record their gaze. An additional set of 24 untrained novice drivers was also evaluated on the driving simulator. Most of the simulated drive consisted of fairly neutral portions that did not contain any potential risks. The participants were instructed that they were to follow a lead vehicle (that was controlled by computer), but that they could lag behind it a reasonable distance (the lead vehicle indicated to the participant driver when to turn and in which direction).

University of Massachusetts driving simulator.
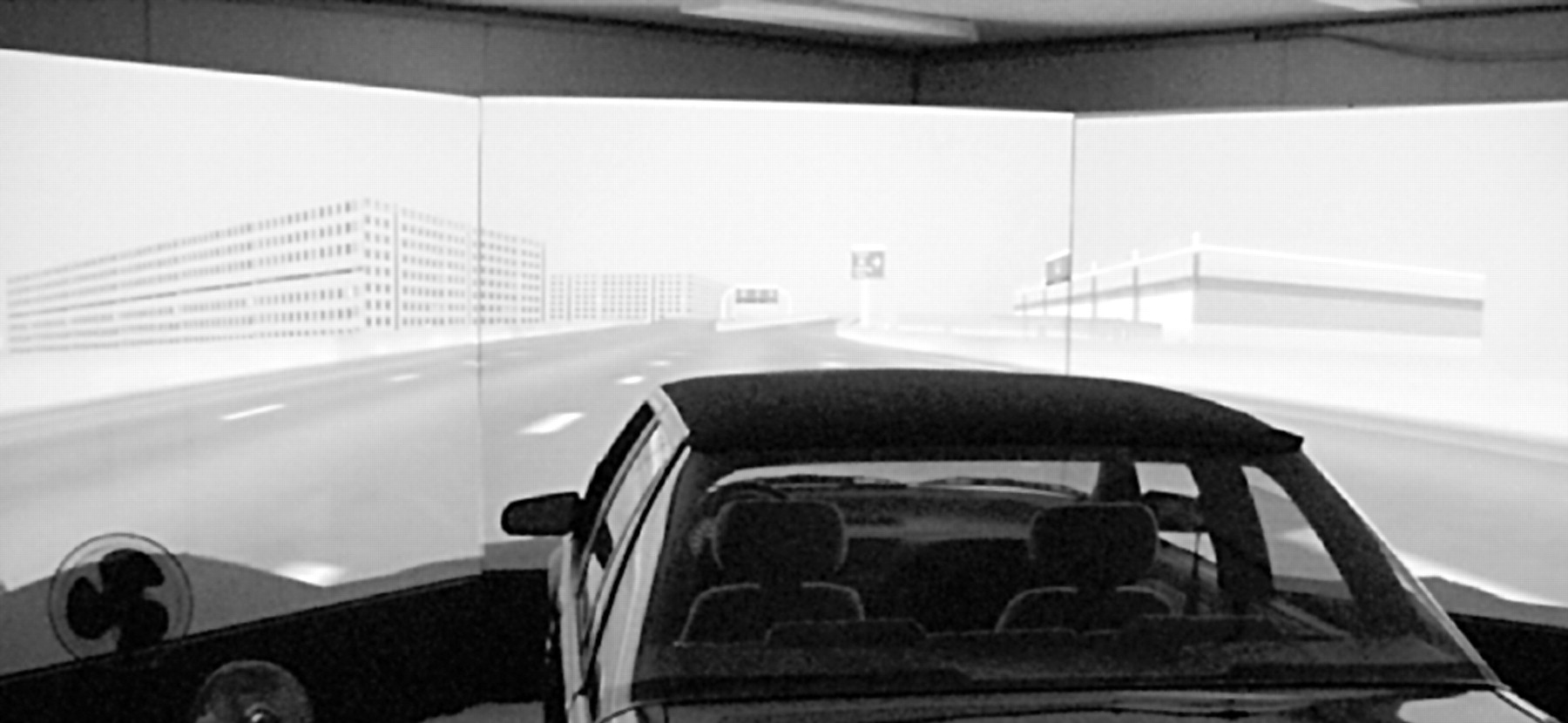
A snapshot from the actual simulation for the truck crosswalk scenario whose plan view was diagrammed earlier is shown in figure 3. In this case, the truck obscures any pedestrians that may be in the crosswalk from the participant driver’s view, and although no pedestrian ever appeared from behind the truck on the right, it would clearly pose a threat if one did. The eye tracker was used to determine whether the driver looked to the right as he or she passed the truck, presumably checking for a pedestrian that might be emerging. A detailed procedure was set for scoring each scenario. The scorer did not know whether the driver was trained or untrained.

Simulator view: truck crosswalk scenario.
The overall effect of training over the near and far transfer scenarios was highly significant (p<0.001), with trained drivers fixated on areas of the roadway which could reduce their likelihood of a crash 57.7% of the time and untrained drivers making such fixations only 35.4% of the time (a difference of 22.3%). Moreover, the training effect was about as large for far transfer as it was for near transfer; the difference between the trained and untrained drivers was 24.6% for the near transfer and 20.0% for far transfer (the interaction between far versus near transfer and training had an F<1).
Simulator tests: RAPT-2
One of the potential weaknesses of the above study is that the trained novice drivers were evaluated on the driving simulator immediately after they had completed the PC based training. In order to remedy this shortcoming, the above study was replicated, only this time 12 novice drivers were evaluated on the simulator 3–5 days after training.29 This represents a period of time which might elapse between PC based training in driver education classes and the novice driver’s applying that training on the road as part of the learner’s permit phase. Another set of 12 participants was evaluated on the simulator as the control group without having been trained on the PC training program. The PC based training program used in the second study (RAPT-2) was modified slightly from RAPT-1, as the training section now included open road, perspective views of the three scenarios on which participants in the first study performed most poorly in the driving simulator. Otherwise, the new version (RAPT-2) remained the same. The trained novice drivers again performed much better on the PC post-test than on the PC pre-test. The crucial question, however, was whether the training on the PC program would lead to improvements on the driving simulator after several days had elapsed since the novice drivers had been trained on the PC. As in the above study, the eye gaze data was analyzed for fixations on areas of a scenario where information could be obtained that would reduce the likelihood of a crash. The novice drivers who had the advantage of the PC based training performed better than the untrained group, fixating on such areas 52.1% of the time, compared to 28.1% for the untrained drivers, a 24.0% difference which was significant (p<0.05) and about the same size as in the above study where the test was immediate. As in the first study, the effect of training for near transfer and far transfer scenarios was about the same (F<1): 23.0% for the near transfer scenarios and 26.0% for the far transfer scenarios.
Field test: RAPT-3
Finally, it is crucially important to know whether training generalizes to the open road. As a preliminary indication of this capability, we have just completed a study of 24 younger drivers 18–21 years old. They have been driving by themselves for 1–4 years. This evaluation is being carried out with a newer version of the training program, RAPT-3. The modifications were introduced to RAPT-2 because even though the risk recognition of the trained novice drivers using RAPT-2 is equivalent to that of experienced drivers, both groups are still far below criterion. Among other things, in RAPT-3 the pre-test and post-test sections now only contain perspective views (recall that RAPT-1 and RAPT-2 contained only plan views in these sections). More specifically, the user is presented with a set of progressively advancing perspective snapshots of a scenario, as seen from the driver’s point of view (fig 4). Users are asked to imagine themselves as the driver of the vehicle, and instructed to use the mouse to click on areas in the view where they would look for information which could reduce their likelihood of a crash if they were actually driving in the scenario. Each snapshot is displayed for only three seconds. A particular scenario consists of 5–12 snapshots, depending on the length and complexity of the scenario. A total of nine scenarios are presented on the pre- and post-test. A driver’s score is based on the location of the mouse clicks.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Sequence of (five) perspective snapshots for the abrupt lane change.
Twelve of the 24 younger drivers were trained using RAPT-3 and 12 were left untrained. Each of the drivers wore a head-mounted portable eye tracker (ASL Mobile Eye) that overlays a cursor representing the driver’s eye fixations on top of a video recording of the driver’s point of view—that is, the roadway through which the driver is traveling. A 16 mile course in the Amherst and Hadley areas was mapped out which includes major arterials and a variety of intersections. Ten different situations/scenarios were chosen along this route. Five of them were similar to some of the scenarios that the novice driver saw in the PC based training—the near transfer scenarios (for example, in Amherst a tall hedge obstructs the view of a pedestrian sidewalk from the driver while he/she is approaching an intersection, behind which bicyclists or pedestrians could potentially emerge) and the remaining five were different from what the novice driver saw in training (the far transfer scenarios). The data collected from these 10 locations in the field were scored blindly, and used to analyze the eye glance behavior of the drivers. We find that significantly more trained drivers (70%) in the near transfer scenarios fixated areas of the roadway scenarios which contained information which could reduce their likelihood of a crash than do untrained drivers (33%, p<0.001), a difference almost identical to what was observed on the driving simulator. Furthermore, the differences in the trained (59%) and untrained (39%) drivers on the far transfer scenarios were smaller, though still significant (p<0.01).
CONCLUSIONS
We find a substantial effect of a PC based training program on novice and younger drivers’ awareness of where they should scan the roadway for information which will measurably reduce their likelihood of a crash—on the PC, on a driving simulator, and on the road. These are the first studies to report gains in all three situations. In contrast to the above, a more recent video based study conducted by Sagberg and Bjørnskau of the hazard detection skills of newly licensed drivers concluded that hazard detection skills do not account for most of the decrease in risk seen in newly licensed drivers over the first six months.30 However, there is a critical difference between this study and the Pradhan et al study reported above.13 In particular, the hazards were visible in a large majority of scenarios that Sagberg and Bjørnskau used.30 This may have made the task too easy and thus produced a ceiling effect. Consistent with this hypothesis, the only two scenarios in their study in which the newly licensed drivers were less likely to perceive the hazard than the more experienced drivers appeared to involve hidden risks emerging suddenly. In summary, the Sagberg and Bjørnskau study indicates that there may be many situations in which even newly licensed drivers perform reasonably well without training, as long as the risk is visible. However, our studies indicate that there are many situations involving hidden risks that present very real problems for novice and younger drivers—and, by implication, newly licensed drivers (see also Pradhan et al31)—and that training can help to reduce these problems. In fact, most of our training studies have succeeded in raising novice and younger drivers’ performance to a level comparable to that of the safest drivers.13,28
Based on the above results, we believe that future studies should include novice and newly licensed drivers in field tests of the effectiveness of a PC based training program such as RAPT-3. We also believe that parents should be included in a training program as well, given that our results suggest even experienced drivers did not often recognize where the information was contained that would best reduce their likelihood of a crash.13 Such a program could be incorporated into current attempts to involve parents as participants in the restricted licensure phase of the GDL.32
About the senior author
Donald Fisher is a professor in the Department of Mechanical and Industrial Engineering at the University of Massachusetts-Amherst. He is the director of the Human Performance Laboratory, where ongoing research includes Project MIDAS (Massachusetts Interactive Driving and Acoustic Simulator), the goal of which is to test the safety and usability of many of the new technologies that will form the backbone of Intelligent Transportation Systems, and Project PROTO, whose purpose is to develop the tools for rapidly prototyping the visual and auditory interface between users and new and evolving products such as audio remote controls, cellular phones, voice mail, ATM, etc. Dr Fisher received a Masters of Education from Harvard University and a PhD in Psychology from the University of Michigan.
Acknowledgments
This paper was first presented as part of the first Expert Panel meeting of the Youthful Driver Research Initiative, a collaborative research program between the Center for Injury Research and Prevention (http://www.chop.edu/injury) at the Children’s Hospital of Philadelphia (CHOP) (http://www.chop.edu) and State Farm Insurance Companies® (State Farm) (http://www.statefarm.com). The views presented in this paper are those of the author(s) and are not necessarily the views of CHOP or State Farm.